Autonomous Robotics

Project information
- Category: Autonomous Driving
- Context: University of Washington
- Year:: 2023
- Github: Link to repo
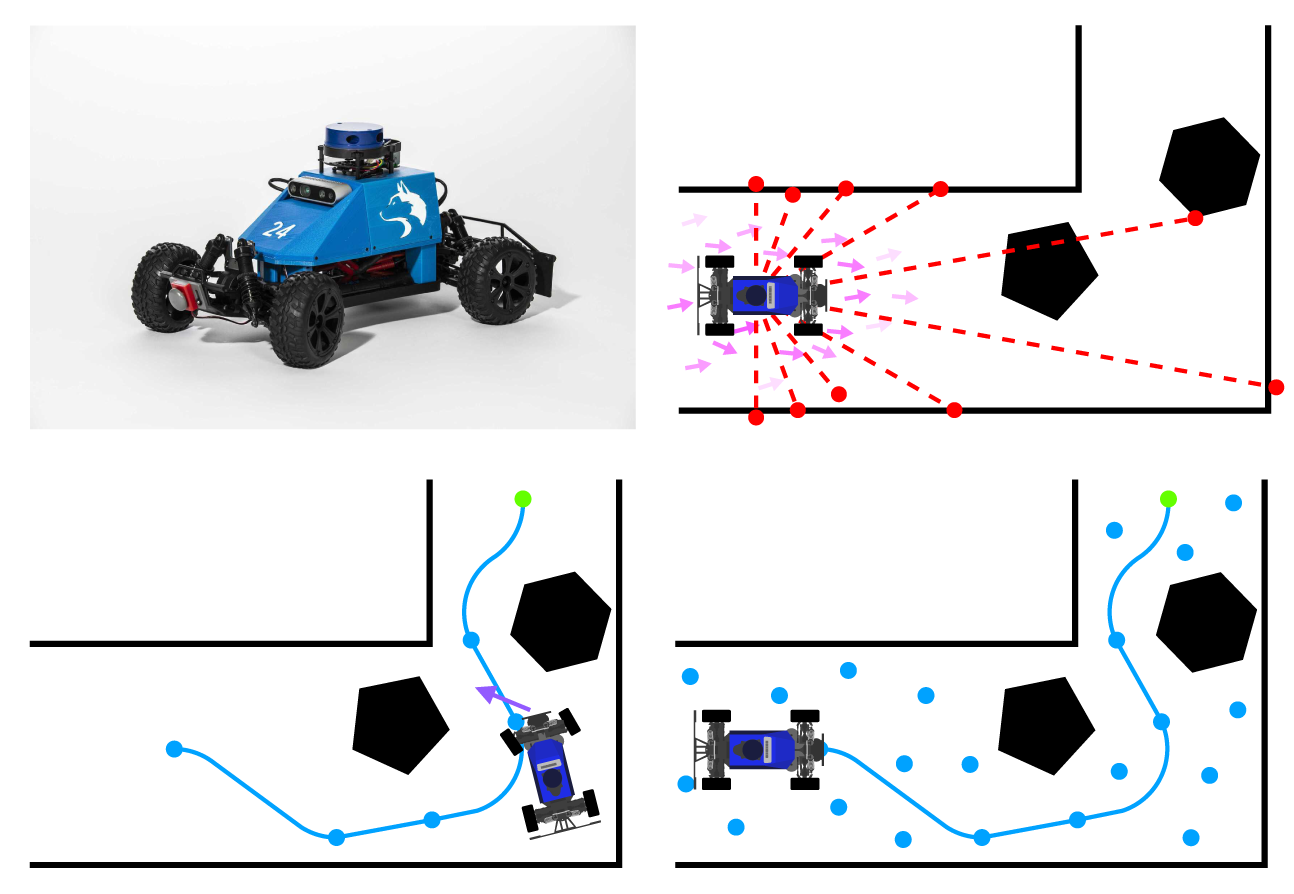
The project was developed as part of the EEP 545 Autonomous Robotics course at the University of Washington. The project was developed using the 1/10th scale MuSHR rally car. I have implemented various state-of-the-art methods and algorithms on the diverse robotic platform.
- Control: PID and MPC (Model Predictive Control).
- Localization: Particle Filter (PF) and Extended Kalman Filter (EKF) with Odometry / Velocity Motion and Beam / Landmark-based Sensor Models.
- Path Planning: RRT / RRT* / A* / LPA*.
- Simulation Environment: ROS and RVIZ
- Languages and Tools: Python